Detection algorithms - Object Localization
Object detection is one of the areas of computer vision that's just exploding and is working so much better than just a couple of years ago.
In order to build up to object detection, you first learn about object localization. Let's start by defining what that means.
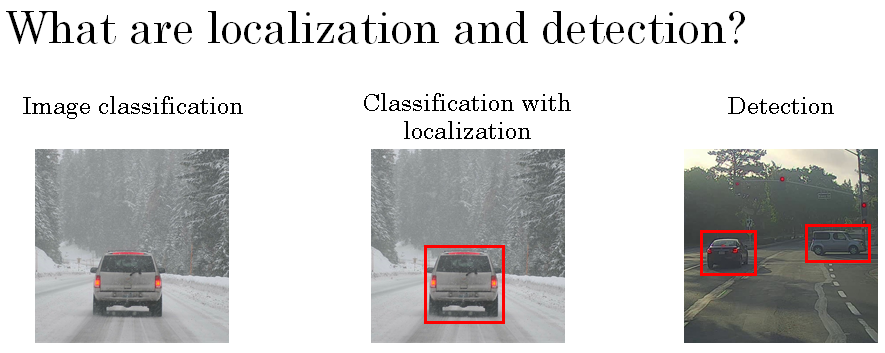
You're already familiar with the image classification task where an algorithm looks at this picture and might be responsible for saying this is a car. So that was classification.
The problem you learn to build in your network to address later on this section is classification with localization. Which means not only do you have to label an object as say a car but the algorithm also is responsible for putting a bounding box, or drawing a red rectangle around the position of the car in the image. So that's called the classification with localization problem.
Where the term localization refers to figuring out where in the picture is the car you've detected. Later, you then learn about the detection problem where now there might be multiple objects in the picture and you have to detect them all and and localized them all.
And if you're doing this for an autonomous driving application, then you might need to detect not just other cars, but maybe other pedestrians and motorcycles and maybe even other objects.
So in the terminology we'll use this week, the classification and the classification of localization problems usually have one object.
Usually one big object in the middle of the image that you're trying to recognize or recognize and localize. In contrast, in the detection problem there can be multiple objects.
And in fact, maybe even multiple objects of different categories within a single image. So the ideas you've learned about for image classification will be useful for classification with localization.
And that the ideas you learn for localization will then turn out to be useful for detection. So let's with classification with localization.
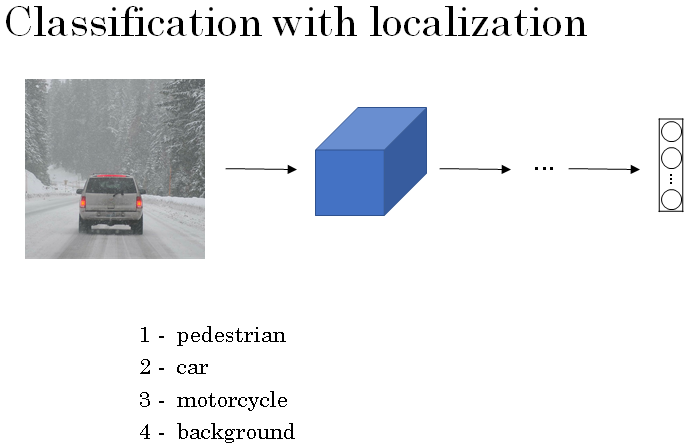
You're already familiar with the image classification problem, in which you might input a picture into a ConvNet with multiple layers and this results in a vector features that is fed to maybe a softmax unit that outputs the predicted class.
So if you are building a self driving car, maybe your object categories are the following: a pedestrian, or a car, or a motorcycle, or a background (none of the above).
So if there's no pedestrian, no car, no motorcycle, then you might have an output -> background. For this we create a standard classification pipeline.
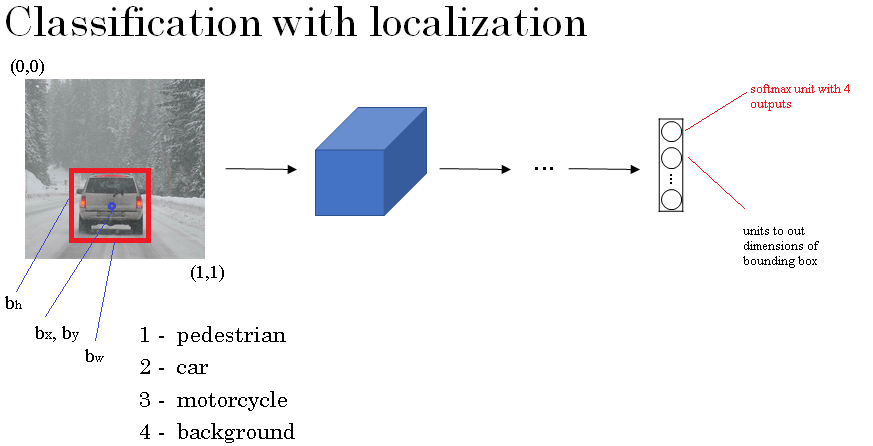
How about if you want to localize the car in the image as well. To do that, you can change your neural network to have a few more output units that output a bounding box.
So, in particular, you can have the neural network output four more numbers, and I'm going to call them bx, by, bh, and bw. And these four numbers parameterized the bounding box of the detected object.
So in this section, I am going to use the notational convention that the upper left of the image, I'm going to denote as the coordinate (0,0), and at the lower right is (1,1). So, specifying the bounding box, the red rectangle requires specifying the midpoint. So that��s the point bx, by as well as the height and width (bh, and bw) of this bounding box.
So now if your training set contains not just the object class label, which a neural network is trying to predict up here, but it also contains four additional numbers. Giving the bounding box then you can use supervised learning to make your algorithm output not just a class label but also the four parameters to tell you where is the bounding box of the object you detected.
So in this example the ideal bx might be about 0.5 because this is about halfway to the right to the image. by might be about 0.7 since it's about maybe 70% to the way down to the image. bh might be about 0.3 because the height of this red square is about 30% of the overall height of the image. And bw might be about 0.4 let's say because the width of the red box is about 0.4 of the overall width of the entire image.
So let's formalize this a bit more in terms of how we define the target label y for this as a supervised learning task. So just as a reminder these are our four classes, and the neural network now outputs those four numbers as well as a class label, or maybe probabilities of the class labels.
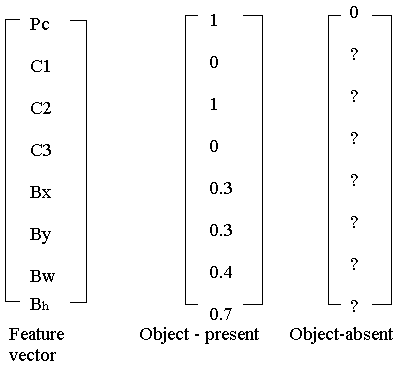
So, let's define the target label y as follows. Its going to be a vector where the first component pc is going to be -> is there an object?
So, if the object is, classes 1, 2 or 3, pc will be equal to 1. And if it's the background class, so if it's none of the objects you're trying to detect, then pc will be 0.
And pc you can think of that as standing for the probability that there's an object. Probability that one of the classes you're trying to detect is there. So something other than the background class. Next if there is an object, then you wanted to output bx, by, bh, and bw, the bounding box for the object you detected.
And finally if there is an object, so if pc is equal to 1, you wanted to also output c1, c2 and c3 which tells us is it the class 1, class 2 or class 3. So is it a pedestrian, a car or a motorcycle. And remember in the problem we're addressing we assume that your image has only one object. So at most, one of these objects appears in the picture, in this classification with localization problem.
So let's go through a couple of examples. If this is a training set image, so if that is x, then y will be the first component pc will be equal to 1 because there is an object, then bx, by, bh, and bw will specify the bounding box.
So your labeled training set will need bounding boxes in the labels. And then finally this is a car, so it's class 2. So c1 will be 0 because it's not a pedestrian, c2 will be 1 because it is car, c3 will be 0 since it is not a motorcycle.
So among c1, c2 and c3 at most one of them should be equal to 1. So that's if there's an object in the image.
What if there's no object in the image? What if we have a training example where x is equal to that? In this case, pc would be equal to 0, and the rest of the elements of this, will be don't cares, so I'm going to write question marks in all of them. So this is a don't care, because if there is no object in this image, then you don't care what bounding box the neural network outputs as well as which of the three objects, c1, c2 and c3 it thinks it is.
So given a set of label training examples, this is how you will construct x, the input image as well as y, the cost label both for images where there is an object and for images where there is no object. And the set of this will then define your training set.
Finally, next let's describe the loss function you use to train the neural network. So the ground true label was y and the neural network outputs some \( \hat{y} \). The cost function - if you're using squared error then the loss can be \( (\hat{y_8} - y_8)^2 + (\hat{y_7} - y_7)^2 + (\hat{y_6} - y_6)^2 + ... + (\hat{y_1} - y_1)^2\).
Notice that y here has eight components. So that goes from sum of the squares of the difference of the elements. And that's the loss if y1 = 1. So that's the case where there is an object. So y1 = pc. So, pc = 1, that if there is an object in the image then the loss can be the sum of squares of all the different elements.
The other case is if y1=0, so that's if this pc = 0. In that case the loss can be just \( (\hat{y_1} - y_1)^2 \) because in that second case, all of the rest of the components are don't cares.
And so all you care about is how accurately is the neural network ourputting pc in that case. So just a recap, if y1 = 1, that's this case, then you can use squared error to penalize square deviation from the predicted, and the actual output of all eight components.
Whereas if y1 = 0, then the second to the eighth components are don't care.
So all you care about is how accurately is your neural network estimating y1 which is equal to pc.
Just as a side comment for those of you that want to know all the details, I've used the squared error just to simplify the description here.
In practice you could probably use a log-likelihood loss for the c1, c2 and c3 to the softmax output. Usually you can use squared error or something like squared error for the bounding box coordinates and if a pc you could use something like the logistics regression loss.
Although even if you use squared error it'll probably work okay.
So that's how you get a neural network to not just classify an object but also to localize it.
The idea of having a neural network output a bunch of real numbers to tell you where things are in a picture turns out to be a very powerful idea.
In the next section I want to share with you some other places where this idea of having a neural network output a set of real numbers, almost as a regression task, can be very powerful to use elsewhere in computer vision as well.