Network Layer: Link State Routing
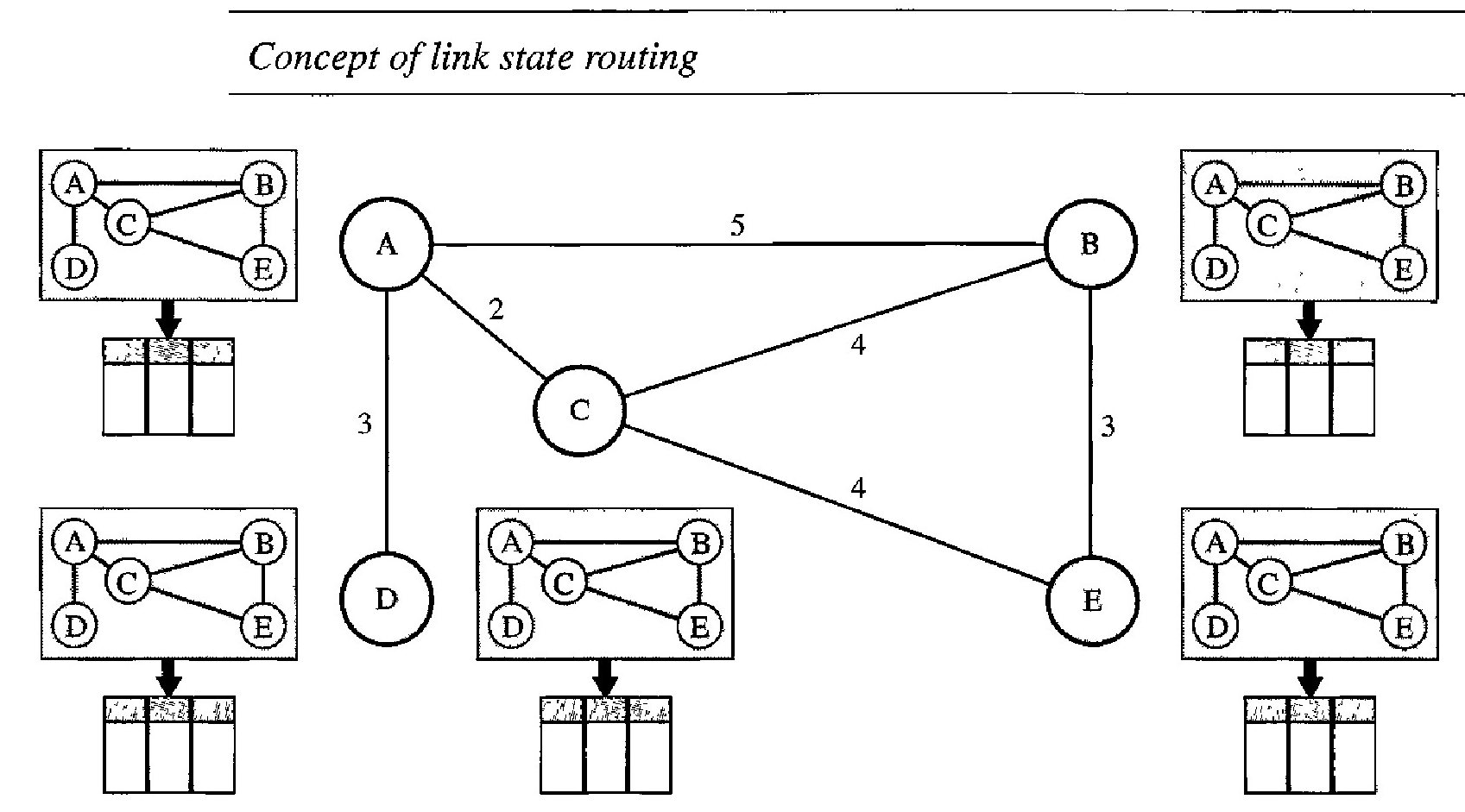
In link state routing, if each node in the domain has the entire topology of the domainthe list of nodes and links, how they are connected including the type, cost (metric), and condition of the links (up or down)-the node can use Dijkstra's algorithm to build a routing table.
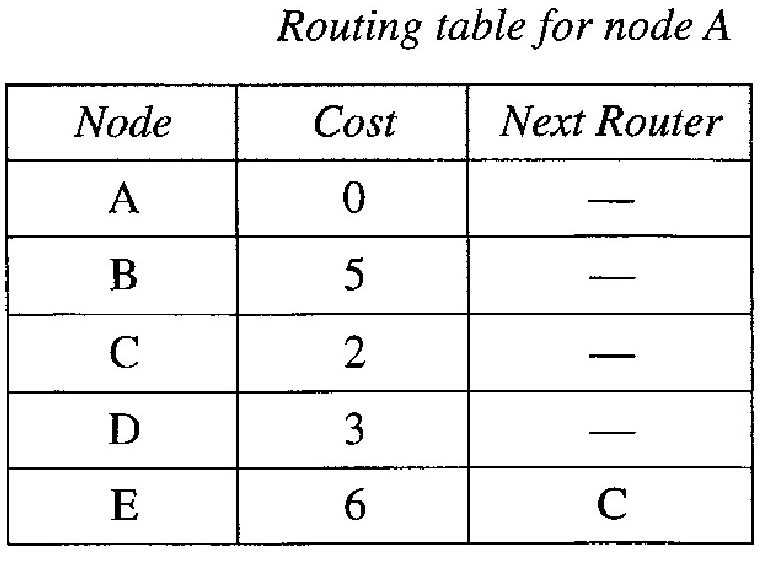
The figure shows a simple domain with five nodes. Each node uses the same topology to create a routing table, but the routing table for each node is unique because the calculations are based on different interpretations of the topology. This is analogous to a city map. While each person may have the same map, each needs to take a different route to reach her specific destination.
The topology must be dynamic, representing the latest state of each node and each link. If there are changes in any point in the network (a link is down, for example), the topology must be updated for each node.
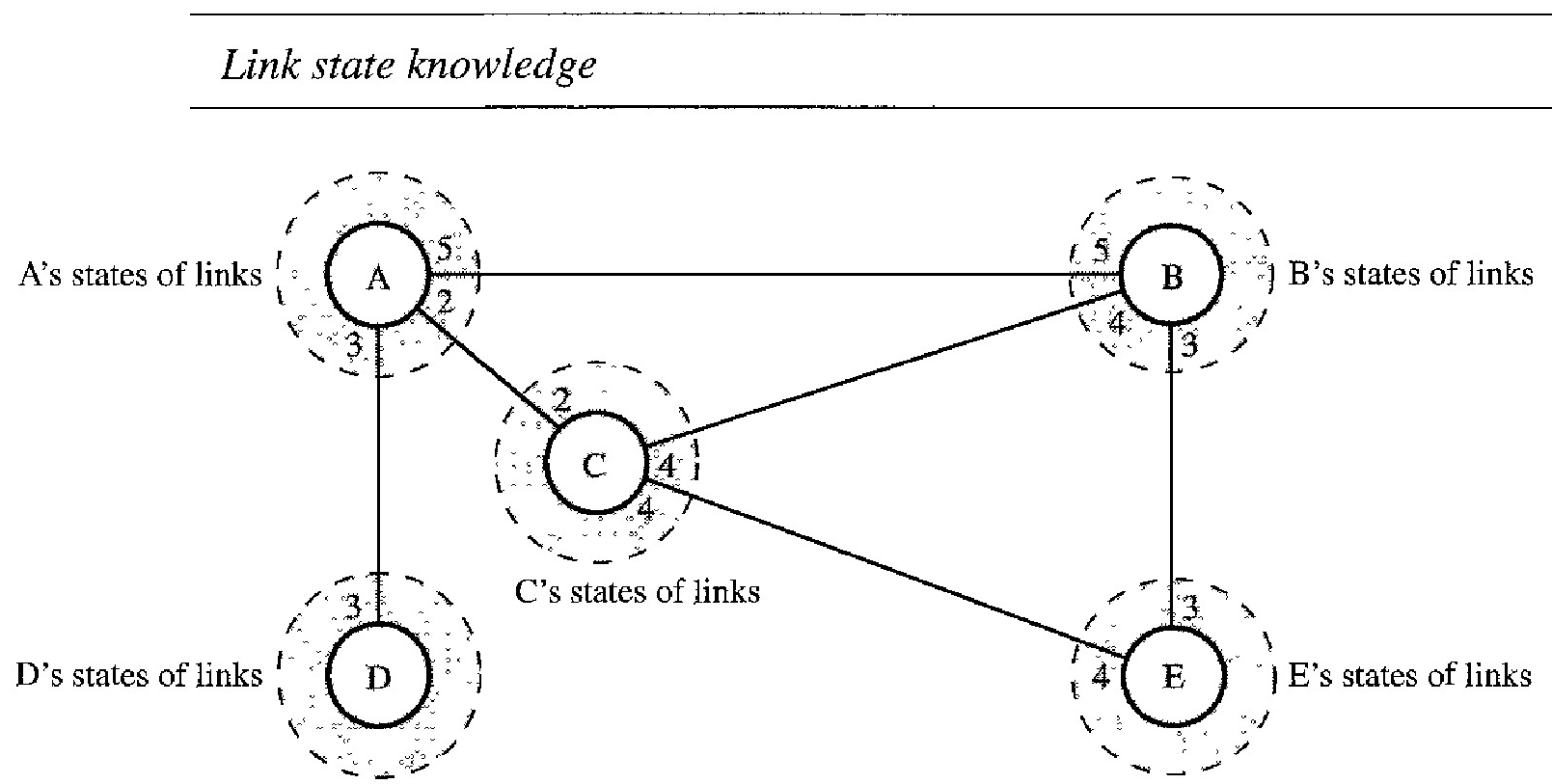
Link state routing is based on the assumption that, although the global knowledge about the topology is not clear, each node has partial knowledge: it knows the state (type, condition, and cost) of its links. In other words, the whole topology can be compiled from the partial knowledge of each node.
Node A knows that it is connected to node B with metric 5, to node C with metric 2, and to node D with metric 3. Node C knows that it is connected to node A with metric 2, to node B with metric 4, and to node E with metric 4. Node D knows that it is connected only to node A with metric 3. And so on. Although there is an overlap in the knowledge, the overlap guarantees the creation of a common topology-a picture of the whole domain for each node.
Building Routing Tables : In link state routing, four sets of actions are required to ensure that each node has the routing table showing the least-cost node to every other node.
Creation of the states of the links by each node, called the link state packet (LSP).
Dissemination of LSPs to every other router, called flooding, in an efficient and reliable way
Formation of a shortest path tree for each node.
Calculation of a routing table based on the shortest path tree.
Q. Creation of Link State Packet (LSP)
A link state packet can carry a large amount of information : the node identity, the list of links, a sequence number, and age.
The first two, node identity and the list of links, are needed to make the topology. The third, sequence number, facilitates flooding and distinguishes new LSPs from old ones. The fourth, age, prevents old LSPs from remaining in the domain for a long time. LSPs are generated on two occasions :
When there is a change in the topology of the domain : Triggering of LSP dissemination is the main way of quickly informing any node in the domain to update its topology.
On a periodic basis : The timer set for periodic dissemination is normally in the range of 60 min or 2 h based on the implementation. A longer period ensures that flooding does not create too much traffic on the network.
Flooding of LSPs : After a node has prepared an LSP, it must be disseminated to all other nodes, not only to its neighbors. The process is called flooding and based on the following:
The creating node sends a copy of the LSP out of each interface.
A node that receives an LSP compares it with the copy it may already have. If the newly arrived LSP is older than the one it has (found by checking the sequence number), it discards the LSP. If it is newer, the node does the following:
It discards the old LSP and keeps the new one.
It sends a copy of it out of each interface except the one from which the packet arrived. This guarantees that flooding stops somewhere in the domain (where a node has only one interface).
Formation of Shortest Path Tree: Dijkstra Algorithm
After receiving all LSPs, each node will have a copy of the whole topology. However, the topology is not sufficient to find the shortest path to every other node; a shortest path tree is needed.
A tree is a graph of nodes and links; one node is called the root. All other nodes can be reached from the root through only one single route. A shortest path tree is a tree in which the path between the root and every other node is the shortest.
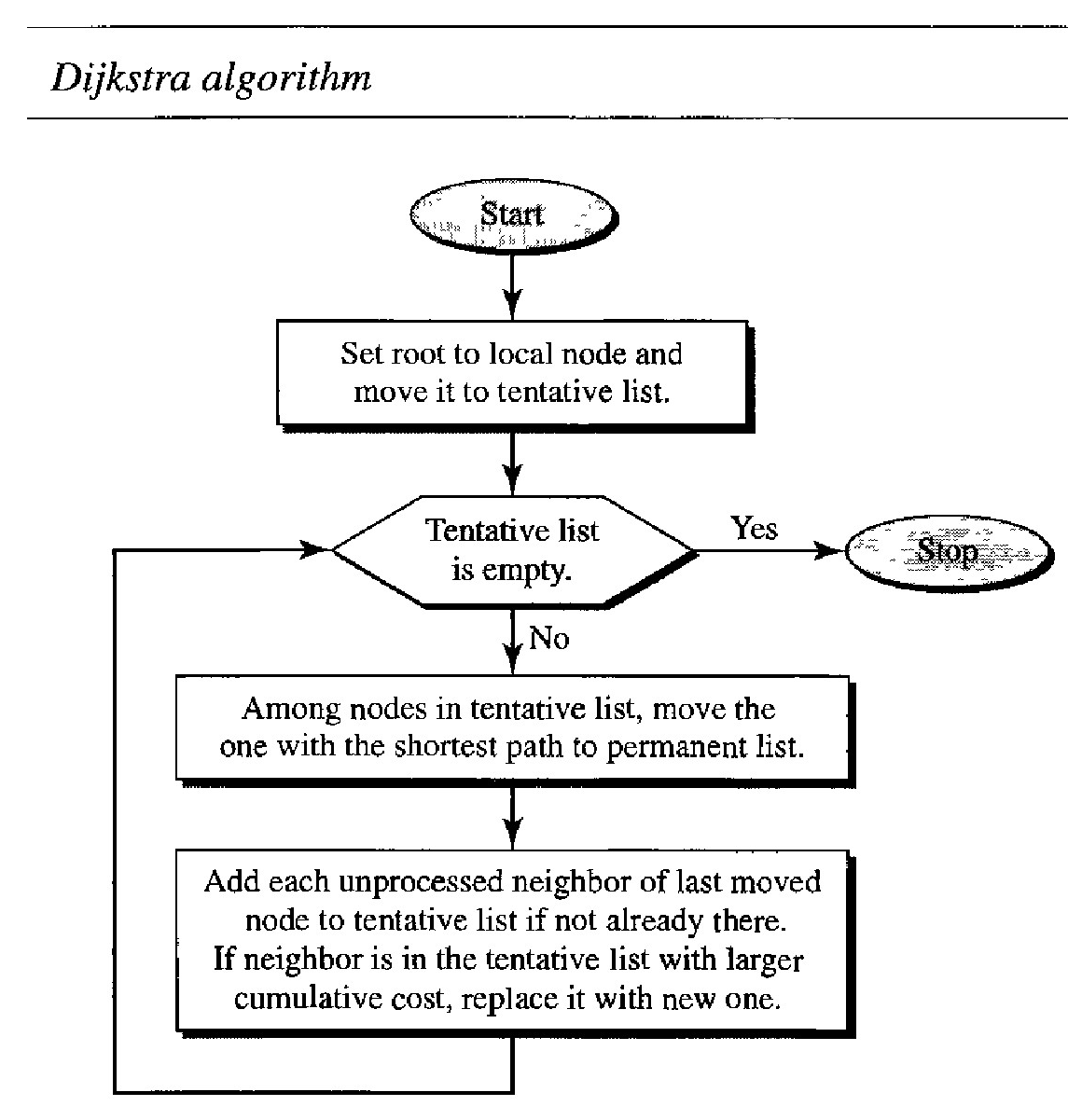
The
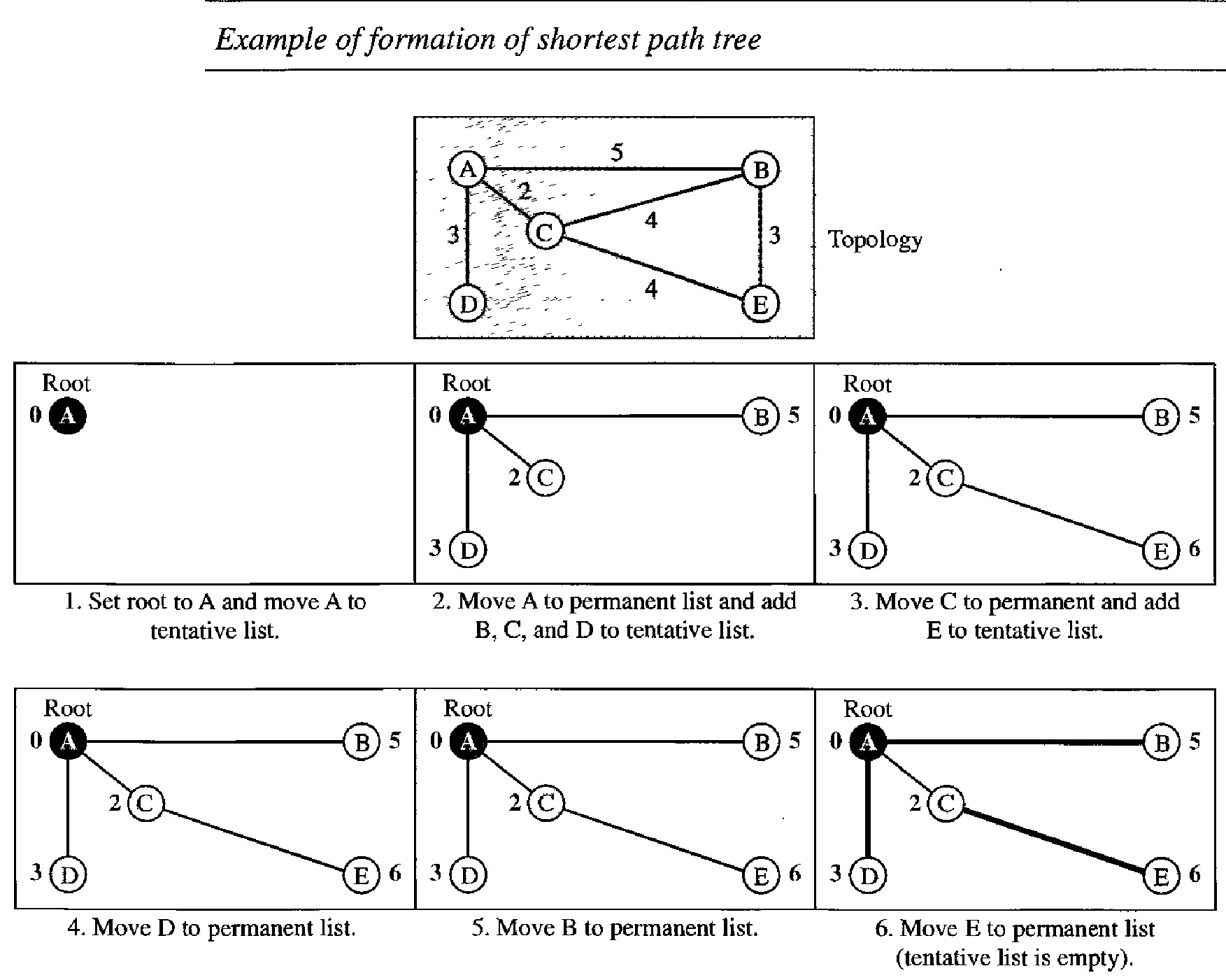
. The algorithm divides the nodes into two sets: tentative and permanent. It finds the neighbors of a current node, makes them tentative, examines them, and if they pass the criteria, makes them permanent. The following shows the steps. At the end of each step, we show the permanent (filled circles) and the tentative (open circles) nodes and lists with the cumulative costs.
Example of formation of shortest path tree :
We make node A the root of the tree and move it to the tentative list. Our two lists are Permanent list: empty ; Tentative list: A(0)
Node A has the shortest cumulative cost from all nodes in the tentative list. We move A to the permanent list and add all neighbors of A to the tentative list. Our new lists are Permanent list: A(0); Tentative list: B(5), C(2), D(3)
Node C has the shortest cumulative cost from all nodes in the tentative list. We move C to the permanent list. Node C has three neighbors, but node A is already processed, which makes the unprocessed neighbors just B and E. However, B is already in the tentative list with a cumulative cost of 5. Node A could also reach node B through C with a cumulative cost of 6. Since 5 is less than 6, we keep node B with a cumulative cost of 5 in the tentative list and do not replace it. Our new lists are Permanent list: A(O), e(2); Tentative list: B(5), 0(3), E(6)
Node D has the shortest cumulative cost of all the nodes in the tentative list. We move D to the permanent list. Node D has no unprocessed neighbor to be added to the tentative list. Our new lists are Permanent list: A(O), C(2), 0(3); Tentative list: B(5), E(6)
Node B has the shortest cumulative cost of all the nodes in the tentative list. We move B to the permanent list. We need to add all unprocessed neighbors of B to the tentative list (this is just node E). However, E(6) is already in the list with a smaller cumulative cost. The cumulative cost to node E, as the neighbor of B, is 8. We keep node E(6) in the tentative list. Our new lists are Permanent list: A(0), B(5), C(2), 0(3); Tentative list: E(6)
Node E has the shortest cumulative cost from all nodes in the tentative list. We move E to the permanent list. Node E has no neighbor. Now the tentative list is empty. We stop; our shortest path tree is ready. The final lists are Permanent list: A(0), B(5), C(2), D(3), E(6); Tentative list: empty
Open Shortest Path First or OSPF protocol
The Open Shortest Path First or OSPF protocol is an intradomain routing protocol based on link state routing. Its domain is also an autonomous system
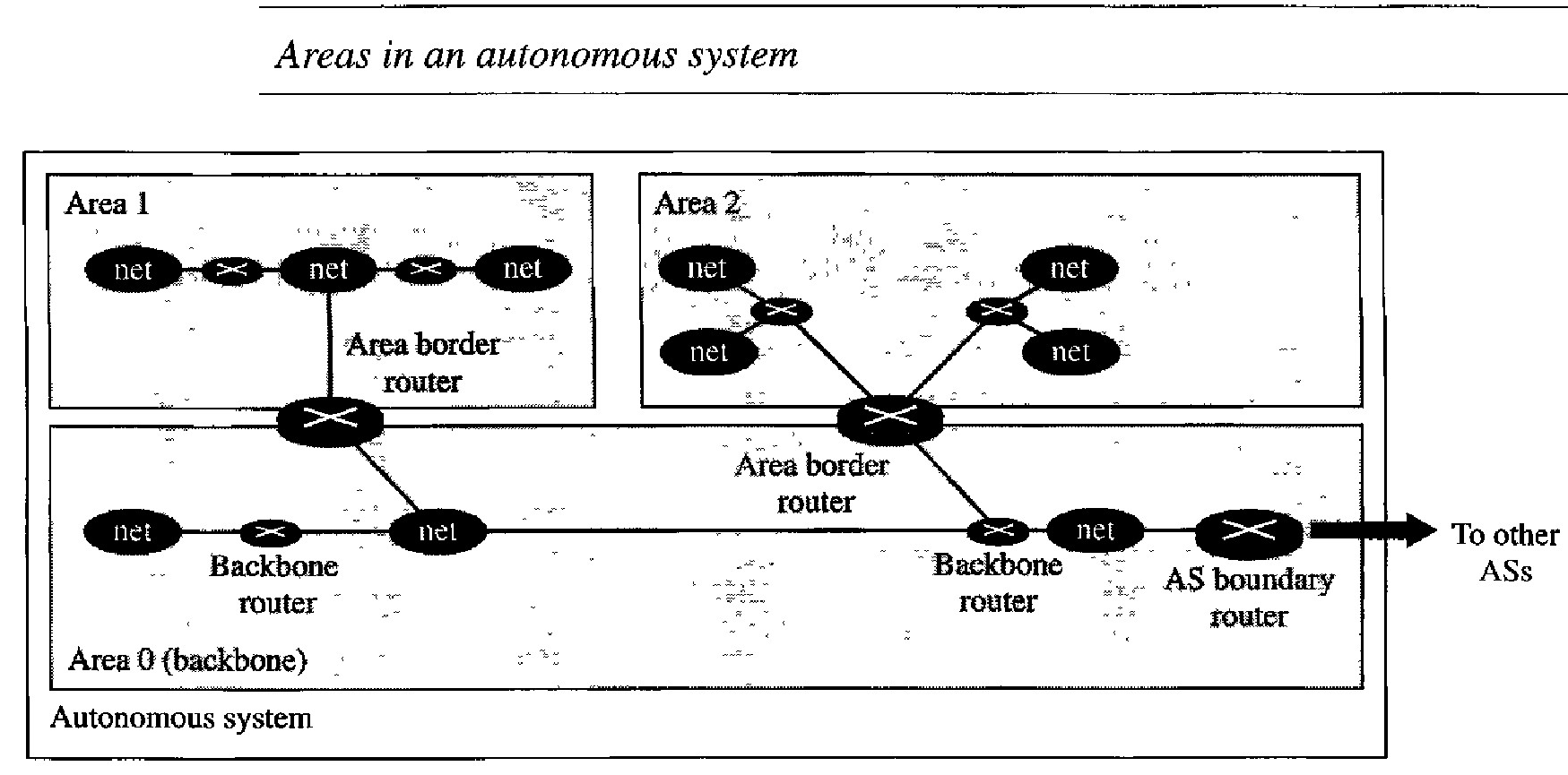
To handle routing efficiently and in a timely manner, OSPF divides an autonomous system into areas. An area is a collection of networks, hosts, and routers all contained within an autonomous system. An autonomous system can be divided into many different areas. All networks inside an area must be connected.
Routers inside an area flood the area with routing information. At the border of an area, special routers called area border routers summarize the information about the area and send it to other areas. Among the areas inside an autonomous system is a special area called the backbone; all the areas inside an autonomous system must be connected to the backbone.
In other words, the backbone serves as a primary area and the other areas as secondary areas. This does not mean that the routers within areas cannot be connected to each other, however. The routers inside the backbone are called the backbone routers. Note that a backbone router can also be an area border router.
If, because of some problem, the connectivity between a backbone and an area is broken, a virtual link between routers must be created by an administrator to allow continuity of the functions of the backbone as the primary area. Each area has an area identification. The area identification of the backbone is zero
The OSPF protocol allows the administrator to assign a cost, called the metric, to each route. The metric can be based on a type of service (minimum delay, maximum throughput, and so on). As a matter of fact, a router can have multiple routing tables, each based on a different type of service.
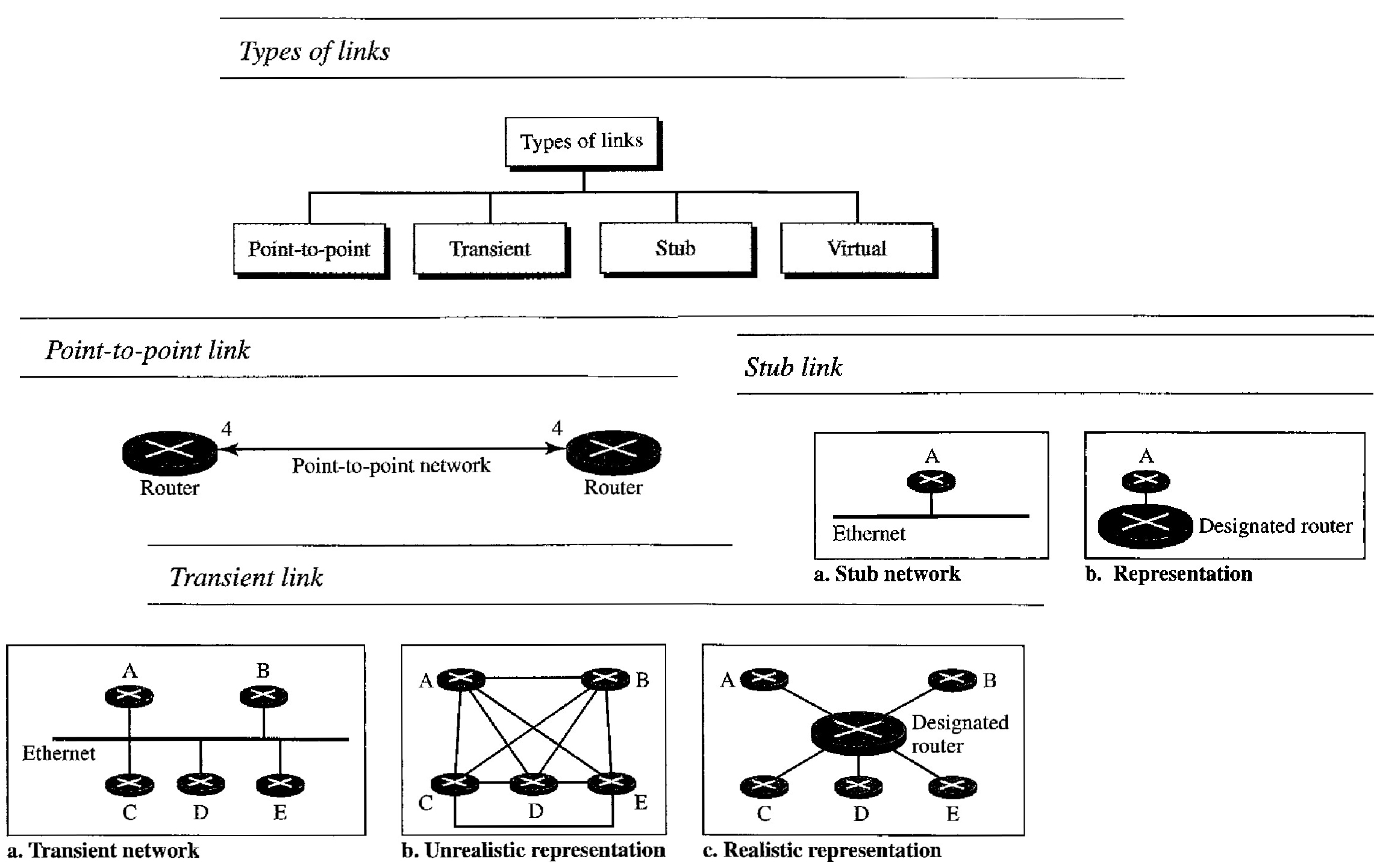
Four types of Links In OSPF
A point-to-point link : connects two routers without any other host or router in between. In other words, the purpose of the link (network) is just to connect the two routers. An example of this type of link is two routers connected by a telephone line or a T line. There is no need to assign a network address to this type of link. Graphically, the routers are represented by nodes, and the link is represented by a bidirectional edge connecting the nodes. The metrics, which are usually the same, are shown at the two ends, one for each direction. In other words, each router has only one neighbor at the other side of the link
A transient link : is a network with several routers attached to it. The data can enter through any of the routers and leave through any router. All LANs and some WANs with two or more routers are of this type. In this case, each router has many neighbors. For example, consider the Ethernet in Figure above. Router A has routers B, C, D, and E as neighbors. Router B has routers A, C, D, and E as neighbors.
A stub link : is a network that is connected to only one router. The data packets enter the network through this single router and leave the network through this same router. This is a special case of the transient network. We can show this situation using the router as a node and using the designated router for the network. However, the link is only one-directional, from the router to the network.
When the link between two routers is broken, the administration may create a virtual link between them, using a longer path that probably goes through several routers.
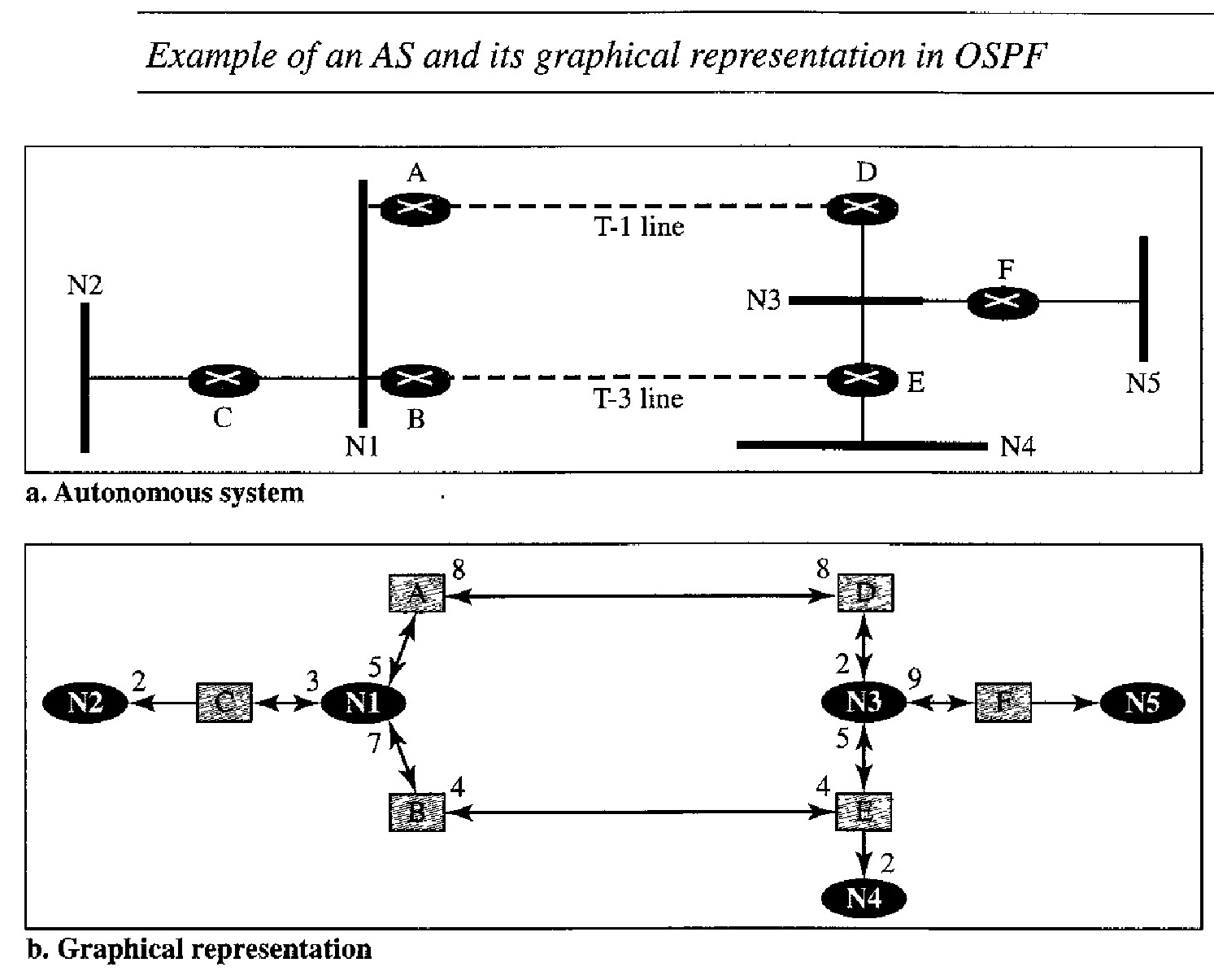
Example of an AS and its graphical representation in OSPF
Figure below shows a small AS with seven networks and six routers. Two of the networks are point-to-point networks. We use symbols such as N1 and N2 for transient and stub networks.
There is no need to assign an identity to a point-topoint network. The figure also shows the graphical representation of the AS as seen by OSPF.
We have used square nodes for the routers and ovals for the networks (represented by designated routers). However, OSPF sees both as nodes. Note that we have three stub networks.