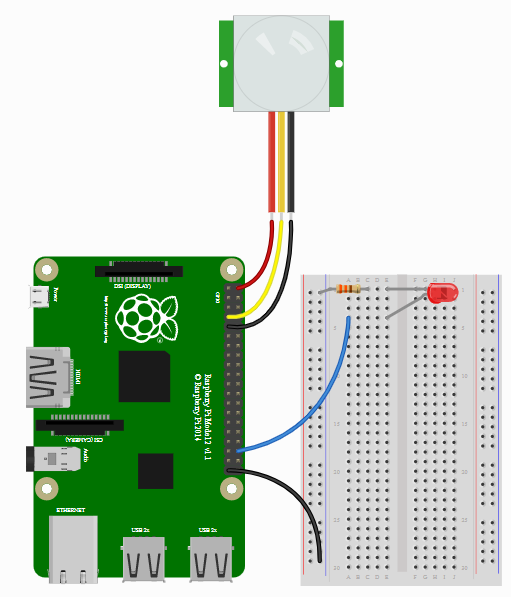
PIR Motion sensor - GPIO library
Light an LED when a MotionSensor detects motion:
from gpiozero import MotionSensor, LED
from signal import pause
pir = MotionSensor(4)
led = LED(16)
pir.when_motion = led.on
pir.when_no_motion = led.off
pause()
Light sensor - GPIO library
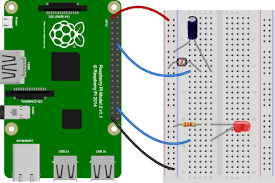
Have a LightSensor detect light and dark:
from gpiozero import LightSensor
sensor = LightSensor(18)
while True:
sensor.wait_for_light()
print("It's light! :)")
sensor.wait_for_dark()
print("It's dark :(")
Run a function when the light changes:
from gpiozero import LightSensor, LED
from signal import pause
sensor = LightSensor(18)
led = LED(16)
sensor.when_dark = led.on
sensor.when_light = led.off
pause()
Or make a PWMLED change brightness according to the detected light level:
from gpiozero import LightSensor, PWMLED
from signal import pause
sensor = LightSensor(18)
led = PWMLED(16)
led.source = sensor
pause()
Distance sensor - GPIO library
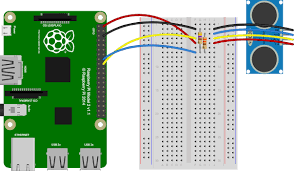
Note In the diagram above, the wires leading from the sensor to the breadboard can be omitted; simply plug the sensor directly into the breadboard facing the edge (unfortunately this is difficult to illustrate in the diagram without the sensor’s diagram obscuring most of the breadboard!)
Have a DistanceSensor detect the distance to the nearest object:
from gpiozero import DistanceSensor
from time import sleep
sensor = DistanceSensor(23, 24)
while True:
print('Distance to nearest object is', sensor.distance, 'm')
sleep(1)
Run a function when something gets near the sensor:
from gpiozero import DistanceSensor, LED
from signal import pause
sensor = DistanceSensor(23, 24, max_distance=1, threshold_distance=0.2)
led = LED(16)
sensor.when_in_range = led.on
sensor.when_out_of_range = led.off
pause()
Servo- GPIO library
Control a servo between its minimum, mid-point and maximum positions in sequence:
from gpiozero import Servo
from time import sleep
servo = Servo(17)
while True:
servo.min()
sleep(2)
servo.mid()
sleep(2)
servo.max()
sleep(2)
Use a button to control the servo between its minimum and maximum positions:
from gpiozero import Servo, Button
servo = Servo(17)
btn = Button(14)
while True:
servo.min()
btn.wait_for_press()
servo.max()
btn.wait_for_press()
Automate the servo to continuously slowly sweep:
from gpiozero import Servo
from gpiozero.tools import sin_values
servo = Servo(17)
servo.source = sin_values()
servo.source_delay = 0.1
Use AngularServo so you can specify an angle:
from gpiozero import AngularServo
from time import sleep
servo = AngularServo(17, min_angle=-90, max_angle=90)
while True:
servo.angle = -90
sleep(2)
servo.angle = -45
sleep(2)
servo.angle = 0
sleep(2)
servo.angle = 45
sleep(2)
servo.angle = 90
sleep(2)
Motors - GPIO library
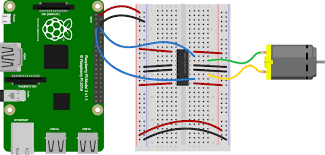
Spin a Motor around forwards and backwards:
from gpiozero import Motor
from time import sleep
motor = Motor(forward=4, backward=14)
while True:
motor.forward()
sleep(5)
motor.backward()
sleep(5)
Robot - GPIO library
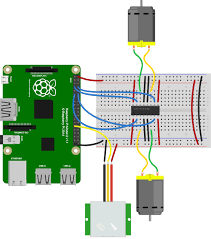
Make a Robot drive around in (roughly) a square:
from gpiozero import Robot
from time import sleep
robot = Robot(left=(4, 14), right=(17, 18))
for i in range(4):
robot.forward()
sleep(10)
robot.right()
sleep(1)
Make a robot with a distance sensor that runs away when things get within 20cm of it:
from gpiozero import Robot, DistanceSensor
from signal import pause
sensor = DistanceSensor(23, 24, max_distance=1, threshold_distance=0.2)
robot = Robot(left=(4, 14), right=(17, 18))
sensor.when_in_range = robot.backward
sensor.when_out_of_range = robot.stop
pause()